Ship-Maneuvering Simulator Improves Harbor Navigation
By Dr. Georges L. Chahine • Dr. Chao-Tsung Hsiao
The U.S. has more than 95,000 mi. of coastline and 3.5 million sq. mi. of open water. Over the last 50 years, ship lengths, widths and drafts have doubled and the amount of commerce has tripled such that over 98 percent of all U.S. cargo is transported at some point by ship through U.S. ports and harbors.
Increasingly larger ships are utilized, and waterways designed for smaller ships are now handling larger ships, resulting in decreased margins of safety and increased risk of accidents. Indeed, according to the U.S. Bureau of Transportation Statistics, there are more than 6,000 ships involved in accidents in U.S. waters resulting in over $100 million in damage each year.
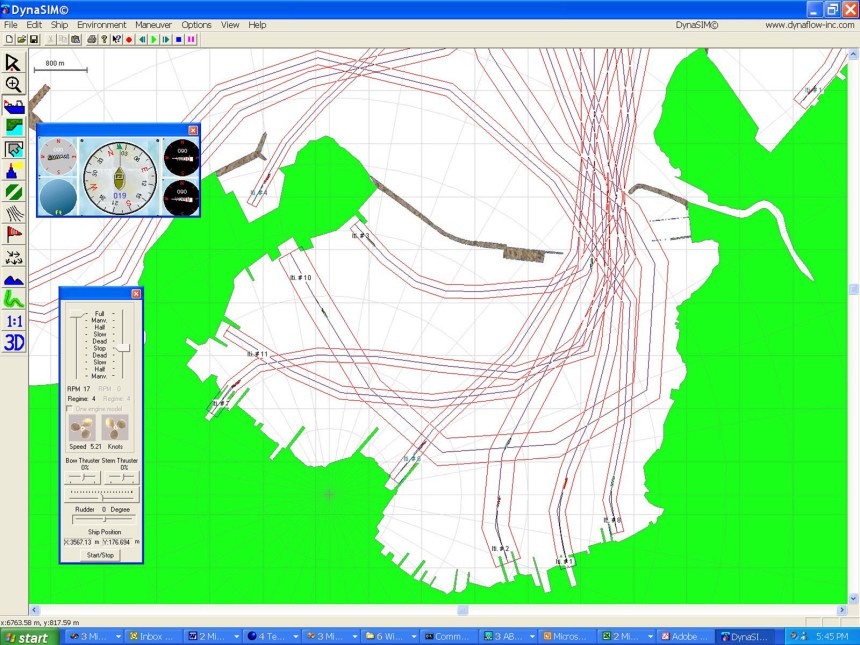
A marine traffic simulator can help engineers and decision makers to cope with the changing requirements of waterway traffic and keep traffic safe. Originally under a grant from NOAA, Dynaflow Inc. has developed a harbor and waterway traffic simulator based on its ship-maneuvering simulator, DynaSim. This effort resulted in a traffic version of DynaSim, a user-friendly, PC Windows-based ship-maneuvering and traffic simulator.
This simulator is capable of modeling multiple interacting ships in the presence of waves, wind, currents and obstacles. Through a graphical user interface, the simulator enables the user to input the topography of the traffic environment (including local water depth, shorelines, channel widths and depths, restricted water configurations, etc.) and record ships’ motion and interaction.
Ship-Maneuvering Model
For each ship, the mathematical model enables accelerated time or real-time solution of the motion based on ship hydrodynamic equations accounting for propulsion forces, as well as resistance and interaction forces due to the environment. The motion equations simply balance mass (or moments of inertia) multiplied by each acceleration component with the sum of all hydrodynamic forces (or moments), including environmental and interaction forces.
The forces acting on the ship are handled in DynaSim in a modular fashion. Forces exerted on each of the components of the ship (hull, propeller, rudder), as well as the interaction and environmental forces, are isolated, and the interaction between these components is also treated separately. Each component force is modeled using physics-based first principles, model tests, sea trials and Taylor series expansions for interpolations.
Object-Oriented Paradigm
The DynaSim software is object oriented and is organized in three independent modules: the mathematical model, the ship/environment visualization module and the graphical user interface.
The mathematical model is developed with the object-oriented language C#. This object-oriented paradigm permits easy integration with the visualization module, the user interaction interface, the multitasking operating system (Windows 10) and the simulation/control of multiple ships. The object-oriented framework used in conjunction with a multitasking operating system allows modular modeling of the simulation system. The multitasking allows simultaneous execution of many threads of the application, and the object-oriented implementation greatly enhances the interaction between threads by passing references to objects (with all their functionalities) rather than a multitude of variables.
The ship simulator software initially creates one thread for the user interface, one for the environment visualization, one for timing and ship synchronization, and one for tracking relative locations of ships. For each ship simulated in DynaSim, one thread is generated for the mathematical model and another for the ship visualization. With this scheme, synchronization between ships is assured knowing that the threads have the following priorities: synchronization, mathematical model, user interaction and, finally, ship visualization. Additional independent threads are created when launching ships according to a schedule, when managing tug-ship interactions and when recording/playing a simulation session. The creation of these additional threads is need-based.
DynaSim Simulation Modes
Three simulation modes are available in DynaSim: user-controlled, standard ship certification maneuvers and computer-controlled (autopiloted) maneuvers along prescribed routes. In the user-controlled mode, the user controls the rudder, the engine and lateral thrusters through a graphic control panel to simulate navigation of a ship. In the standard maneuver mode, DynaSim can simulate a ship performing one of the classical maneuvers recommended by the International Maritime Organization (IMO) for evaluating the hydrodynamic characteristics and maneuverability of a ship. Under the computer-controlled maneuvers mode, the simulator can model ship traffic in prescribed harbors, the open ocean and/or in a restricted environment. The behavior of the ships in the simulation is based on the U.S. Code of Conduct of Vessels, with the traffic central parameters being adjustable by the users.
Ship Traffic Simulations
Traffic simulations can be conducted under the concept of a user-input “itinerary” for each ship. The itinerary specifies the planned ship route, the width of the zone of safe deviation from this ideal route and the planned speed on each segment of the route. Autopilot routines are then applied to each ship to maneuver the ship along the planned route according to the Inland Navigational Rules, a subtitle of the U.S. Code for Navigation and Navigable Waters. DynaSim uses a global time frame for the simulation of many ships such that the relative positions of all ships and their potential interactions, as well as the position of each ship relative to the simulation environment at each instant are always known. This is key to enabling traffic simulation and safety metric computations. The global simulation time frame is established based on the computer’s clock time. The simulation reference time is set to zero when a simulation session is first started. All the timings in the simulation thereafter are based on the time elapsed since that reference time.
Example of Safety Evaluation for Scheduled Traffic
The simulator can provide safety scores as the simulation proceeds. Two independent safety characteristics of a traffic configuration are considered in DynaSim: propensity, the likelihood of a significant event affecting safety to occur during normal operations; and resilience, the extent to which the traffic management system responds to a safety-significant event without causing more of such events.
In harbor traffic management, a “safety-significant event” is a ship collision with another ship, a ship collision with a structure or a ship grounding. A set of safety metric models are implemented in DynaSim to evaluate safety concerns among ships, between a ship and nearby structure, and for a ship in a prescribed environment. These safety metrics are capable of quantitatively evaluating the safety of a ship, as well as the safety of the whole planned traffic system in consideration.
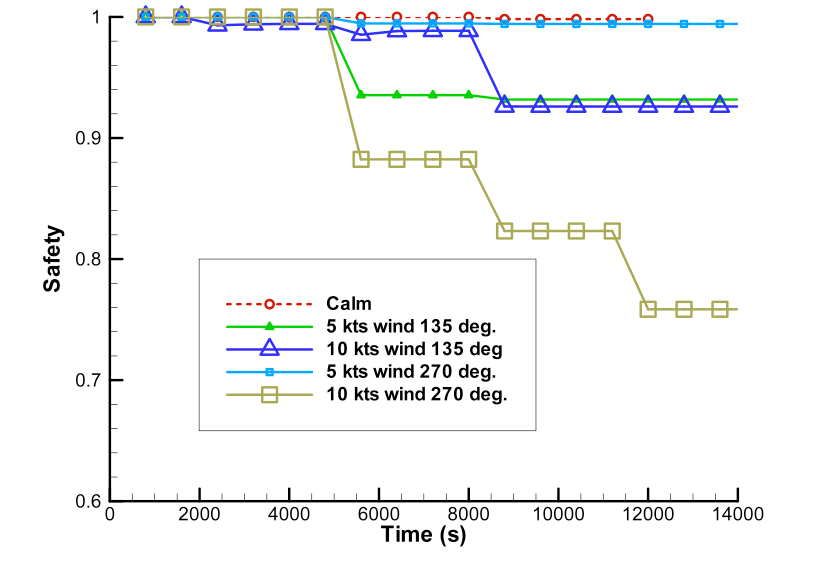
An example is a prescheduled harbor traffic configuration considered under various wind conditions: two nominal wind speeds (5 and 10 kt.) and two wind directions (135º and 270º from the East). The wind speed is set to the nominal wind speed in the open area and is less than the nominal wind speed in the protected harbor areas.
The safety factor can be viewed as a function of time for the various environmental conditions. The safety factor is seen to degrade with the intensity of the wind, especially at each close encounter between ships.
DynaSim can also simulate ship traffic subjected to a combination of environmental conditions. Environmental factors affect the potential for accidents substantially. DynaSim can quantify the likelihood of collision depending on vessel hydrodynamics, traffic density, navigation channels’ geometries and environmental conditions.
Using this simulation tool, harbor designers and port managers can evaluate new waterway designs; modifications (e.g., ship size, characteristics, harbor obstacles, ship schedule, etc.); implementation of safety measures under simulated traffic; and weather conditions. This simulator can also be useful for maneuvering training, harbor-traffic planning and waterway management.
Learn more at: www.dynaflow-inc.com.
Dr. Georges L. Chahine, president and founder of Dynaflow Inc., has led the development of DynaSim. He has an academic background in naval architecture, civil engineering and applied mathematics (doctorate). He has published more than 400 technical papers and reports and a book, and holds three patents.
Dr. Chao-Tsung Hsiao, principal research scientist at Dynaflow Inc., earned a Ph.D. in mechanical engineering from Pennsylvania State University and has contributed to numerous engineering and research projects, including cavitation and ship-maneuvering and simulation projects.